Presentation by Devika Kakkar and David Smiley.
Room K401, CGIS Knafel building, 1737 Cambridge St.
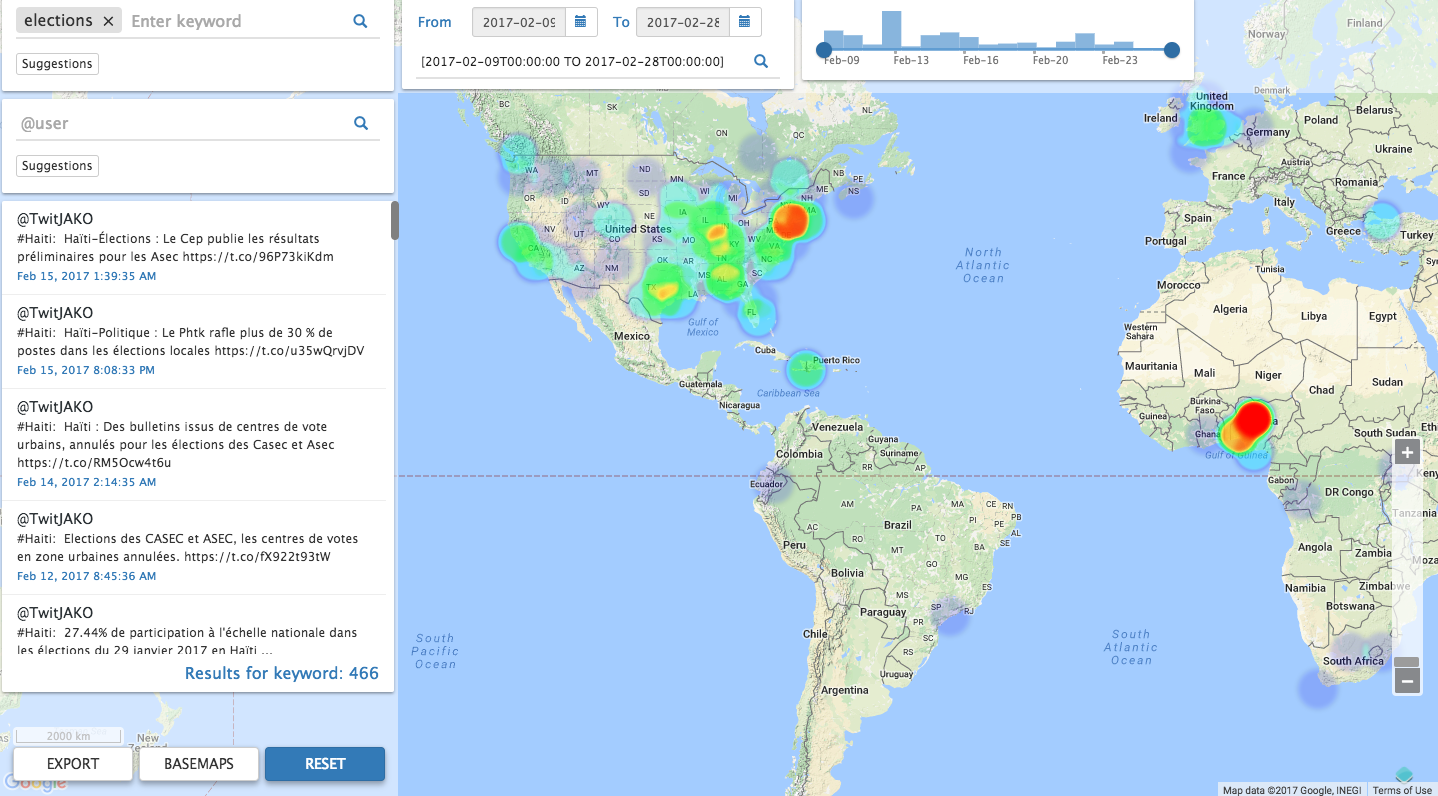
Abstract: Billion Object Platform (BOP) provides access to real-time streaming flows of spatio-temporal datasets for research purposes and presents a method for harvesting, enriching, storing, indexing, visualizing and querying a billion streaming geo-tweets. This talk will discuss the BOP architecture built using an open source solution stack of Apache Lucene, Solr, Kafka, Zookeeper, and frameworks Swagger, scikit-learn, OpenLayers, and AngularJS.
Bio: Devika Kakkar is a Geospatial Engineering Fellow working on system development projects at the Center for Geographic Analysis. Devika has experience as a Research Associate at Fraunhofer IIS, Germany, and as a Research Assistant with London School of Economics and German Research Foundation. She holds a Master degree in Geodesy and Geoinformation Science from Technical University Berlin, Germany. Her past research has focused on Indoor Positioning and Urban Economics.
David Smiley is a freelance consultant and software developer specializing on search technologies with Apache Lucene/Solr. David is a committer and PMC member with the Apache Lucene/Solr project and he co-wrote the first book on Solr – Apache Enterprise Search Server (PACKT), now in its third edition. Within the code-base, David is most known for developing much of the spatial code, and for establishing the Spatial4j library that some of Lucene uses. He’s native to Massachusetts, residing in Lowell. He has a Bachelor’s degree in Computer Science from Northeastern University.
Lunch will be served.
no links
Files:
bop.png
{kind=link}